Hardware

Nema17-04
Waarom:
Ik heb deze stappenmotor gekozen omdat ik heel precies moet kunnen werken. Door middel van de joystick moet de motor de snelheid aanpassen hoe ver de joystick gaat. Ik ga hier van 2 gebruiken om het doolhof te laten bewegen.
Specificaties:
• Schacht diameter: Ø 4.5 x 22 mm (enkele schacht)
• Connector: 6-pole connector (JST), 4 pinnen gebruikt
• Stappen per revolutie: 200
• Houdkoppel: 0,45 Nm
• Nominale spanning: 3.3V
• Nominale stroom: 1.5A
• Stap hoek: 1.8°
• Aantal fasen: 2
• Fase weerstand: 2.2Ω
• Afmetingen: 42 x 42 x 42 mm
• Gewicht: 0,3kg
• Gebruiks temperatuur: -10° – 50°
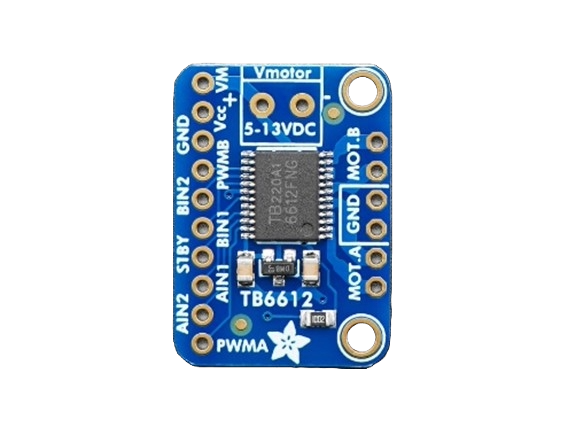
TB6612
Waarom:
Dit is de motor controller die ik ga gebruiken om mijn stappenmotoren aan te sturen. Het heeft gemakkelijke aansluitingen en het is eenvoudig te gebruiken omdat je de verschillende spoelen aanspreekt met digitale poorten. Dit stuur je aan via 2 digitale ingangen per H-brug: voor elke helft van de brug.
Specificaties:
• • Ingangsspanning: 3.3V – 5V DC
• Max stroom aan een stuk: 1,2A
• Min vermogen: 3,24W
• Merk: Adafruit
• Gewicht: 1.8g
• Afmetingen: 27mm x 19mm x 3mm
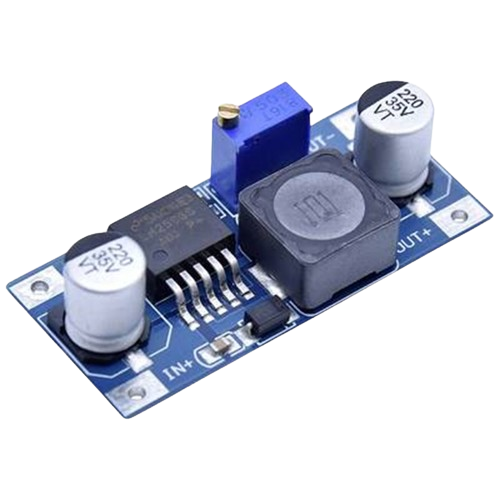
LM2596 Buck Converter
Waarom:
Dit is de Buck converter, deze converteert een hogere spanning naar een lagere spanning, die ik ga gebruiken omdat het gemakkelijk aan te sluiten is. Dit ga ik gebruiken om mijn motoren aan te sturen zodat de microcontroler daar geen extra werk voor moet doen. Ik gebruik dit ook omdat mijn arduino niet genoeg vermogen leverd om de motoren aan te sturen.
Specificaties:
• Min. Voedingsspanning: 3V DC
• Max. Voedingsspanning: 40V DC
• Min. Uitgangsspanning: 1.25V DC
• Max. Uitgangsspanning: 35V DC
• Chipset: LM2596S

Mass Power AC Adapter
Waarom:
Ik gebruik deze power supply om mijn motoren stroom te geven doordat het een te grote last zou hebben op mijn microcontroller. De power supply zal een gewone net spanning van 100-240V, 50 – 60Hz omzet naar een kleinere 12V en 0.5A.
Specificaties:
• Invoer: 100-240V~0.18A 50-60Hz
• Uitvoer: 12V 0.5A
• Vermogen: 6W

WS2812B LED Strip
Waarom:
Ik heb deze LED's gekozen omdat je ze apart kan aanspreken via maar 1 data aansluiting, Dus het aansturen verloopt via een databus. Hierdoor kan ik op dezelfde poort verschillende LED's tegelijkertijd een andere kleur geven. Ik heb hiervoor al een library gevonden.
Specificaties:
• Voedingsbron: 5V DC voeding
• Spanning: 5V
• Vermogen: 18W
• Item gewicht: 20 gram
• Productafmetingen 4,72 x 3,94 x 0,59 inch
• Gemiddelde levensduur 50000 uur
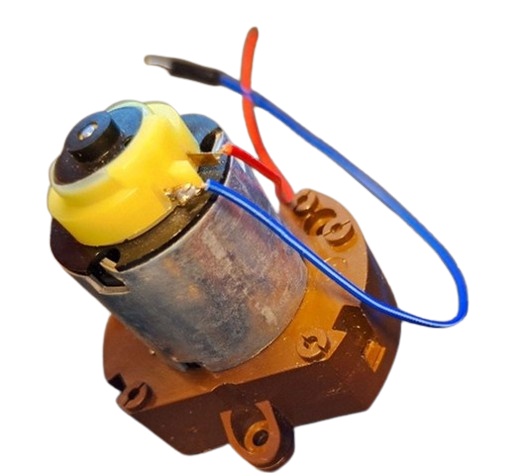
DC-Moter
Waarom:
Deze motor zal gebruikt worden om de knikker spiraal te besturen. Hiervoor heb ik maar 1 motor nodig. Ik heb deze motor gekozen omdat het een gemakkelijk en eenvoudige functie heeft. Hierbij heb ik niet de nauwkeurigheid nodig van een servo motor.
Specificaties:
• Spanning: 5V - 12V
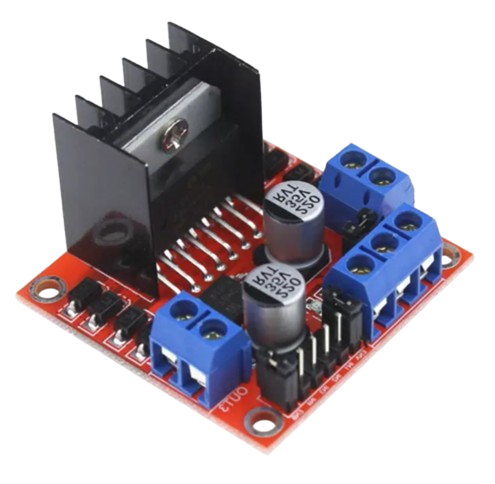
L298N motor driver
Waarom:
Ik gebruik deze motordriver om een DC motor eenvoudig te kunnen aansturen. Hierbij moet ik gewoon de spannings kabel in de juiste poort steken, de data kabeltjes en de twee draden van de dc motor. De driver kan 5V tot 35V gebruiken om de motor aan te sturen.
Specificaties:
• Vermogen: 25W
• Aanstuur spanning: 5V – 35V
• Stroom: 2A
• Chip: L298N
• Afmetingen: 43mm x 43mm x 26mm

Arduino Mega
Waarom:
Ik heb dit bordje gekozen omdat het meerdere digitale en analoge aansluitingen heeft. Het kan 3,3V of 5V leveren. Maar dit zal niet genoeg zijn voor wat ik nodig heb, daarvoor gebruik ik een externe voeding voor de motoren. Ik gebruik op dit bordje 15 digitalen IO's en 4 analoge IO's.
Specificaties:
• Power: Vin, 3.3V, 4V en GND
• Analoge pinnen: A0 – A15
• Input/Output pins: Digitale pinnen: 0 – 53
• Serieel: Rx en Tx
• Werkspanning: 5V
• Aanbevolen ingangsspanning: 7 – 12V
• Ingangsspanning limieten: 6 – 20V
• DC-Stroom op I/O pinnen: 20mA
• DC-Stroom op 3,3V pin: 50mA
• Flash geheugen: 256KB
• SRAM: 8KB
• EEPROM: 4KB
• Frequentie (klok snelheid): 16MHz

TCRT5000 Reflective Optical Infrarood Sensor
Waarom:
Ik heb deze afstandssensor gekozen omdat deze redelijk compact is. Het verschil van signaal wanneer er een balletje passeert zal ik uitlezen en gebruiken voor de punten.
Specificaties:
• Collector-Emitter: spanning: 70V
• Detectie afstand: 0,591 inch (15mm)
• Detectie methode: reflectie
• Voorwaartse stroom: 60 mA
• Collector stroom: 100mA
• Max werkingstemperatuur: 85 °C
• Max. vermogensverlies: 200 mW
• Min. Werkingstemperatuur: -25 °C
• Type uitgang: Fototransistor
• Spanningsbereik (DC): 70 V
• Emitter golflengte: 950 nm
• Hoogte: 7 mm
• Lengte: 10,2 mm
• Breedte: 5,8 mm

Joy-it Arcade Joystick
Waarom:
Ik heb deze joystick gekozen omdat het zowat de retro gaming look heeft. Het aansluiten hierbij is zoals een button. Maar dan x4 omdat het eigenlijk 4 knopjes zijn. Dit zijn dan natuurlijk digitale signalen. Zou je hierbij op tragere snelheden willen werken moet je de grootte per stap van de stappenmotor veranderen.
Specificaties:
• Diepte: 65 mm
• Hoogte: 98 mm
• Breedte: 120 mm
• Gewicht: 238g
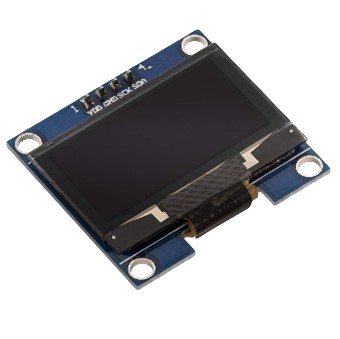
OLED DISPLAY
Waarom:
Ik heb een LED display nodig voor de punten en de punten per kleur te laten zien. Het is een compact 1.3 inch OLED scherm. Hiermee zal ik dus de lettergrootte van verschillende teksten opzetten. Het schermpje wordt aangestuurd via I²C.
Specificaties:
• VCC: 3.3V of 5V power supply
• SCL: I²C SCL
• SDA: I²C SDA
• Resolutie: 128x64
• Vermogen: 40mW
• Kijkhoek: >160°
• Gewicht: 6g
• Dimensie X: 37mm
• Dimensie Y: 34mm
Hardware blokschema
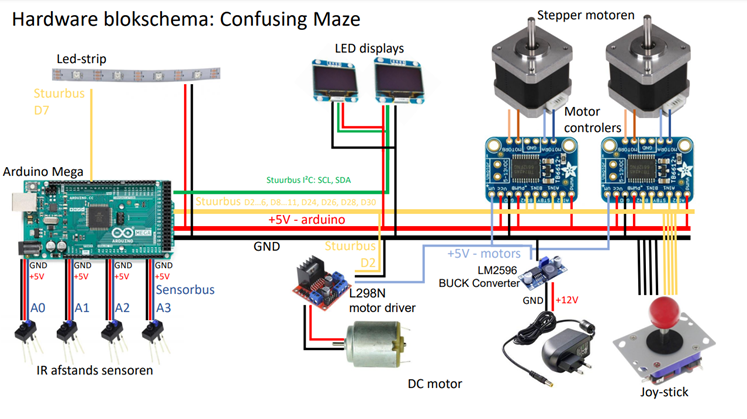
Dit is mijn blokschema met al de componenten die ik gebruik in dit project. Alles wordt aangestuurd met een Arduino Mega. Het LED display wordt aangestuurd via het protocol I²C. De stapper motoren worden aangestuurd met een TB6612 motor controller.
Eagle schema's
Motor controller PCB Schema
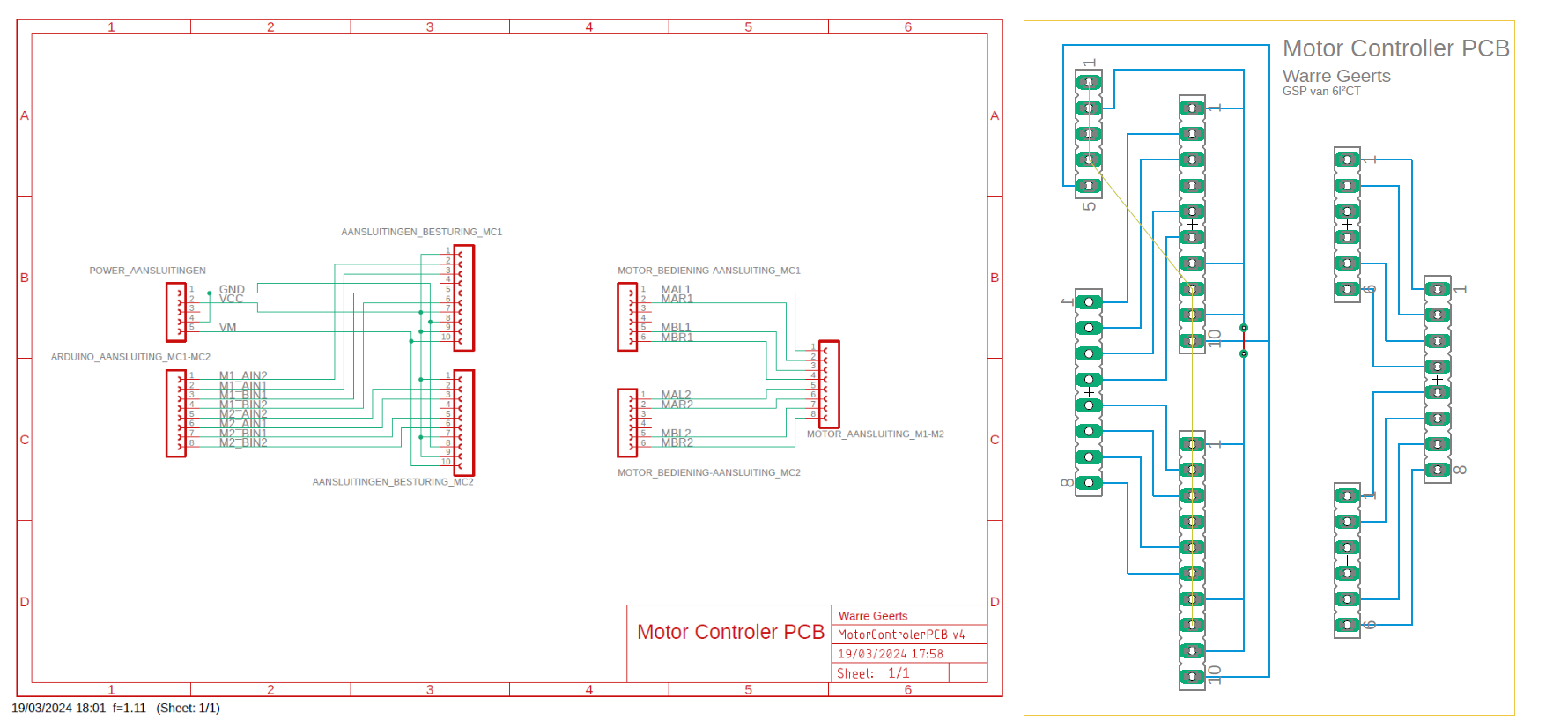
Ik heb dit PCB bordje gemaakt voor de eenvoud. Dit kwam doordat het vorig bordje dat ik zelf had gemaakt en gesoldeerd op een gaatjes printplaat niet zo goed ging. Het is gemaakt zodat je heel gemakkelijk de motor controllers er uit kan halen en vervangen.
Kabel Aansluitingen
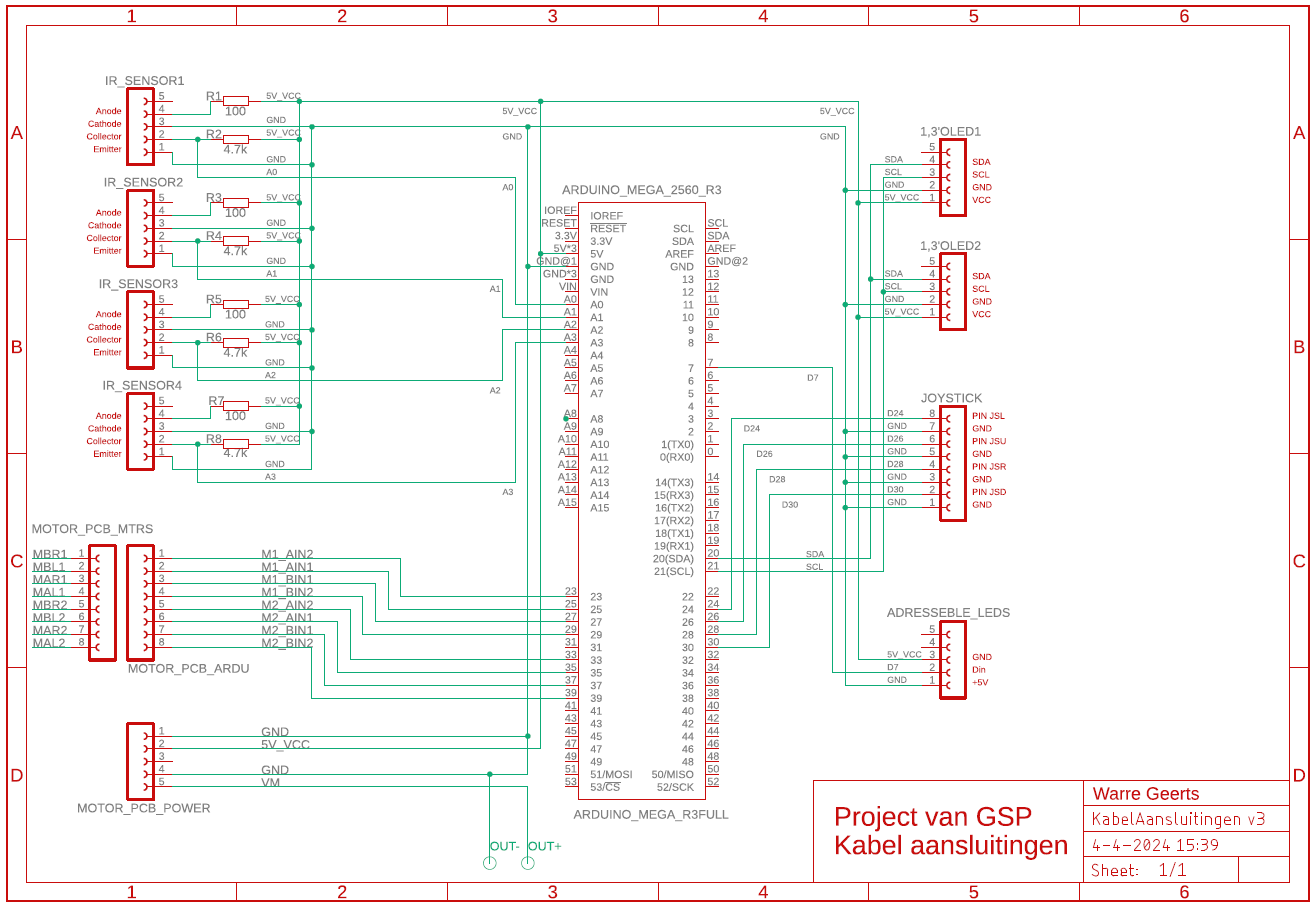
Ik heb dit schema gemaakt zodat ik eenvoudig de aansluitingen van al de componenten kan zien. Zo kan ik ook zeker zien hoeveel poorten ik gebruik of over zijn.